Auf Youtube sieht man immer wieder Videos von Vertikalplottern, die – meist recht behäbig – Bilder an Wände zeichnen, sprayen oder auch mal punktweise stempeln. Die meisten dieser Projekte werden über einen Arduinom angesteuert. Ich habe mir in den letzten Wochen verschiedene dieser Projekte angeschaut mit dem Ziel, einen davon nachzubauen und in brauchbarer Qualität ein paar Bilder für die leeren Wände zuhause zu plotten.
Die Qual der Wahl – ein bisschen von überall

An Vertical Plotter oder Wall Plotter Projekten herrscht kein Mangel, viele der Projektseiten befinden sich aber in einem verwahrlosten Zustand oder sind zwar vielfach verlinkt, aber nicht mehr online. Am Ende blieben der Makelangelo, PlotterBot und Polargraph in der engeren Auswahl übrig. Für alle Projekte werden auf den Websites Bausätze zum Kauf angeboten, frei verfügbar gibt es teils umfangreiche Anleitungen und die notwendige Software zum Download.
Am interessantesten fand ich schlußendlich das Polargraph-Projekt, einerseits da dessen Erfinder Sandy Noble schon in der Anfangsphase des Projektes ein sehr umfangreiches Tutorial auf Instructables.com veröffentlicht hat, mit dem ich einige Grundelemente des Plotters sehr schnell austesten konnte, andererseits wegen der verfügbaren Processing-Software, die auf meiner Mac OS X Umgebung schon bei ersten Tests gut funktioniert hat und ich mich in Processing halbwegs gut auskenne.
Außerdem hat Sandy es mithilfe der aktiven Community in seinem Forum geschafft, die Server-Firmware für seinen Polargraph so weit zu optimieren, dass die Software in den Speicher eines Arduino Uno R3 passt – und einen besseren Arduino habe ich derzeit nicht zur Verfügung.
Hier ein Zeitraffer einer frühen Version des Plotters:
Jetzt aber zum Aufbau eines eigenen Vertical Plotters.
Die Bauteile
Im Shop von Polargraph gibt es verschiedene Kits und auch Einzelteile zu kaufen, darunter auch eine großartige Gondel (die Halterung für den Stift, die von den beiden Perlenketten bewegt wird). Ich habe mich dann aber doch für den Maker-Weg entschieden und mit handelsüblichen Bauteilen und einigen Teilen aus meinem (ja auch selbstgebauten) 3D-Drucker eine ganz eigene Version des Polargraph entwickelt.
Es sind wirklich nicht viele Teile notwendig (und einige der wenigen hier aufgelisteten sind eigentlich fast Luxus), hier eine Übersicht:
Rahmen:
- Eine Holzplatte oder ähnliches, nicht zu klein.
- Eine Holzleiste, 3×3 cm oder mehr, zur Verstärkung des oberen Randes der Platte. Da werden dann die Motorhalterungen draufgeschraubt
Mechanik und Motoren:
- 2 Schrittmotoren (was auch immer grade da ist, 200 Schritte/U reichen), z.B. STEPPERONLINE E Series Nema 17 Schrittmotor 2A 55Ncm 1,8 Grad mit 1 Meter Kabel für 3D-Drucker CNC(1 Pack)
- Befestigungswinkel für die Schrittmotoren (gibts z.B. hier, geht notfalls auch im Selbstbau oder 3D-Druck)
- einen kleinen Modellbauservo samt Servohorn
- 2 Perlenketten, wie sie bei Jalousien verwendet werden, gibts im Baumarkt
- 2 Zahnräder für die Perlenketten, diese sollten auf die Welle der Schrittmotoren passen, z.B. meine Zahnräder als 3D Modell
- die Gondel für den Stift, z.B. meine Variante als 3D Modell (da gibts noch jede Menge andere Ideen dazu, einafach googlen)
Elektronik:
- Ein Arduino Uno R3 (oder vergleichbar, muss aber mind 32 KB Speicher haben)
- Ein Adafruit Motor Shield V2 (V1 geht auch, ist aber nur mehr als Nachbau erhältlich)
dazu noch ein paar Kleinteile wie Schrauben und Klebeband, ein paar Drahtbrücken und, je nach Größe des Plotters, Kabel und etwas Werkzeug.
Achtung: Das Adafruit Motor Shield gibt es meist nur als Bausatz zu bestellen, es müssen aber nur ein paar Schraubklemmen und Stiftleisten angelötet werden, das geht ganz einfach.
Software:
Zum Betrieb des Plotters habe ich die Polargraph-Software von Sandy Noble verwendet. Der enthaltene Arduino-Sketch kann 1:1 auf den Arduino Uno übertragen werden und dient als Server für die ebenfalls enthaltene Polargraph Applikation. Diese ist in Processing geschrieben und im ZIP auch als vorkompilierte Version für Windows, OS X und Linux enthalten. Die aktuelle Version der Polargraph Software steht hier zum Download bereit.
KraxlBot – Aufbau, Version 1:
Weil der Plotter an der Wand herumkraxelt wie ein Bergsteiger, hat er jetzt auch einen Namen bekommen. KraxlBot! Zum besseren Verständnis zuerst ein Bild des Plotters im (derzeitigen) Endzustand.
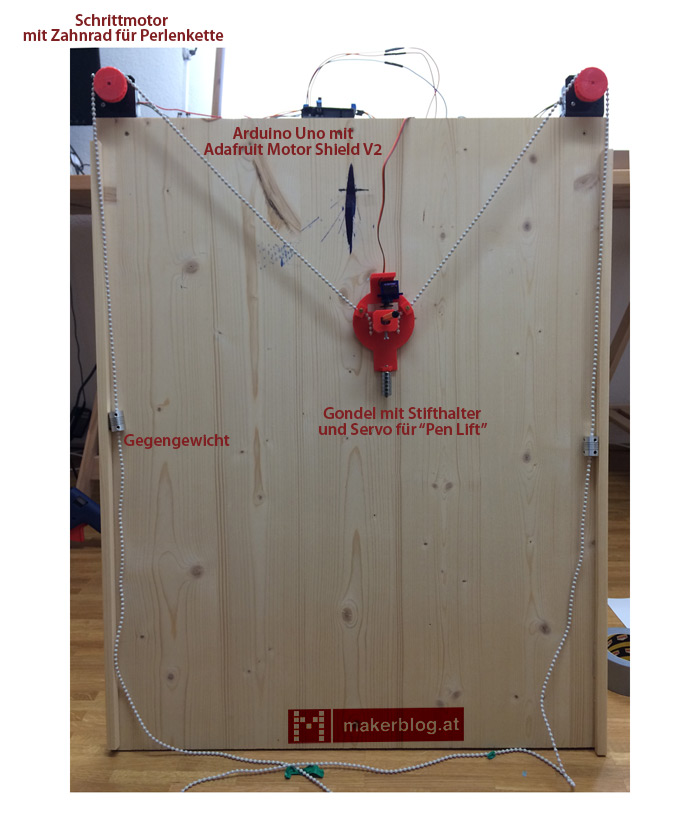
Wie man sieht, besteht der Plotter nur aus recht wenigen Teilen. Ich habe eine Holzplatte (ca. 65x85cm) aus der Restekiste verwendet und auf der Rückseite mit einer leicht angeschrägten Stütze versehen, damit sie frei neben dem Werktisch stehen kann.
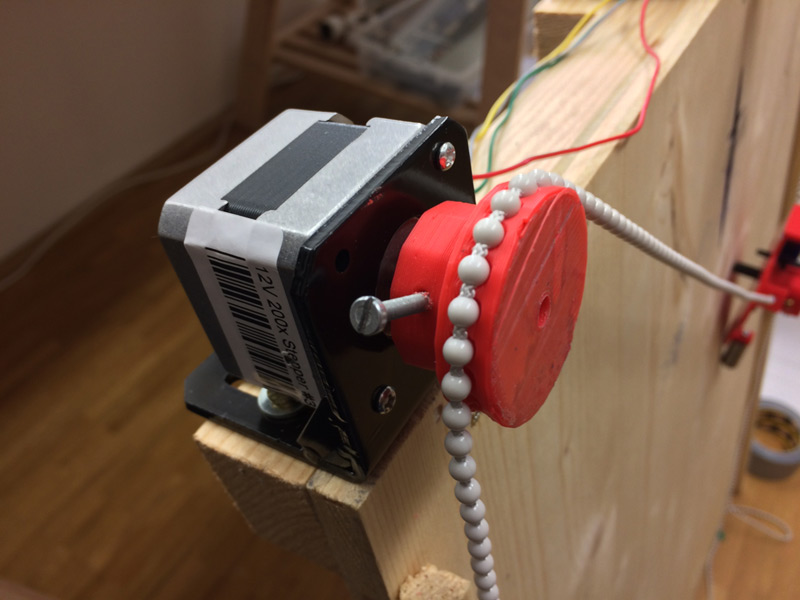
Am oberen Rand der Platte habe ich hinten eine Holzleiste (3x4cm) angeschraubt, um Platz für die Befestigung der Montagewinkel für die Schrittmotoren und etwas Ablagefläche für den Mikrocontroller zu gewinnen. Die Zahnräder für die Perlenketten sind so gedruckt, dass sie direkt auf die 5mm-Welle der Motoren aufgesteckt und falls nötig mit einer M3 Schraube fixiert werden können.
Achtung: Bei diesen Perlenketten scheint es verschiedene System mit unterschiedlichen Perlengrößen und -abständen zu geben. Meine Kette hat Perlen mit ca. 4mm Durchmesser, die in Abständen von ca. 6mm an der Schnur angebracht sind.
Bei der Montage der Schrittmotoren bitte darauf achten, dass das 4-aderige Anschlußkabel des Motors auch bis zum Arduino reicht – oder rechtzeitig für Verlängerung sorgen.

Den Arduino Uno samt Adafruit Motor Shield V2 habe ich derzeit einfach mittig auf die Holzleiste gelegt und hinten mit einem Metallwinkel vor dem Abrutschen gesichert. Da muss auf jeden Fall noch eine elegantere Lösung her. Für die Motoren reicht die Stromversorgung des Arduino über USB nicht aus, ich verwende zusätzlich ein einfaches Steckernetzteil (z.B ein Voltcraft USPS 1000), das ich auf 12V eingestellt habe. Man kann aber auch z.B. einen 9V-Block direkt an das Motor Shield anschließen.
Die Verkabelung der Schrittmotoren mit dem Motor Shield ist etwas trickreich, da sowohl der angesteuerte Motor (links/rechts) als auch die Laufrichtung stimmen und die Anforderungen der Software erfüllen soll. Am besten zuerst den Aufbau fertigstellen, dann die Polargraph Firmware aufspielen und mit der PC-Software im manuellen Modus die am Bildschirm angezeigten Bewegungen mit den tatsächlichen abgleichen. Im schlimmsten Fall (so war es bei mir) müssen dann sowohl die Motoren an die jeweils anderen Anschlüsse (M1 und M2 am Shield) gesteckt und bei der Verkabelung noch die Reihenfolge der Kabelpaare vertauscht werden. Versuch und Irrtum!
Will man den Polargraph auch mit einer Vorrichtung zum Anheben des Stiftes ausstatten (anfangs nicht unbedingt notwendig, aber dann zeichnet er halt bei jeder Bewegung oder muss während der Fahrt zum Startpunkt des Plots manuell angehoben werden), dann muss der zugehörige Servo an den Servo2-Stecker des Motor Shield.
Die Gondel habe ich mittlerweile mehrmals überarbeitet, wirklich gut funktioniert sie aber noch nicht. Größter Nachteil ist, dass die beiden Punkte, an denen die Perlenkette aufgehängt ist, nicht drehbar gelagert sind. Das werde ich in einer der folgenden Versionen korrigieren. Auf Thingiverse gibt es aber noch viele weitere Varianten, einfach nach „polargraph“ oder „gondola“ suchen. Die perfekte Gondel mit kugelgelagert beweglichen Aufhängungen gibts im Polargraph-Shop.
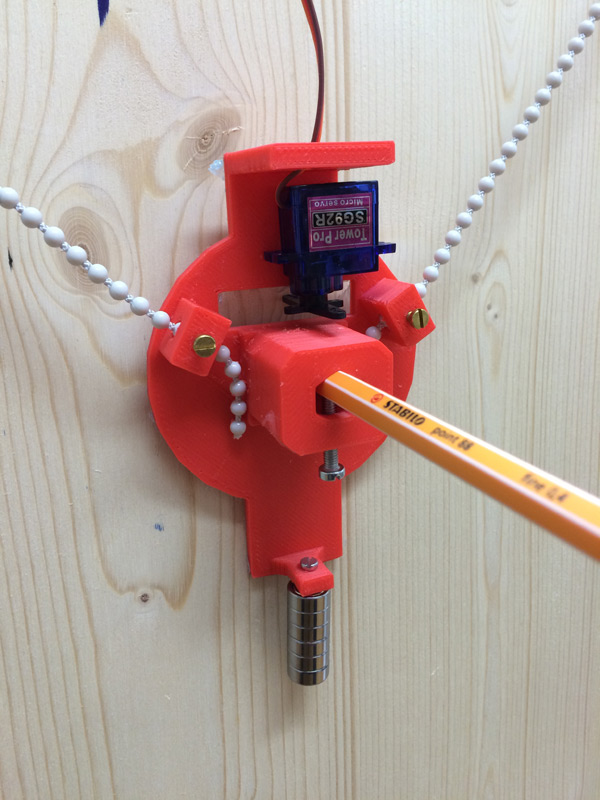
Die Perlenkette wird durch die Öffnung des jeweiligen Halters geführt und mit einer M3 Schraube festgeklemmt. Der Stift wird in die Stifthalterung geschoben und mit einer M4-Schraube fixiert (da ist die Öffnung im Modell etwas klein, notfalls nachbohren). Wird auch ein Servo zum Abheben des Stifts von der zeichenfläche verwendet, so ist daraug zu achten, dass der Stift nicht zu weit durch die Halterung ragt. Der Servo muss im „Lift“-Zustand weiter in Richtung Zeichenfläche ragen als der Stift. Den genauen Drehwinkel des Servos für „Pen Lift“ und „Pen Drop“ kann man später in der Software einstellen. Die Drehrichtung muss aber passen, also vor dem Ankleben testen!
Am unteren Ende der Gondel ist noch eine Öffnung für eine M3-Schraube angebracht, an der einige Gewichte befestigt werden können. Das erhöht die Stabilität und Laufruhe der Gondel. Man kann hier aber auch einfach irgendetwas Schweres ankleben oder mit einer Schnur oder Klemme befestigen. Am besten ist es, auch an den losen Seiten der Perlenketten kleine Gewichte anzubringen (vorher kontrollieren, bis wohin die Kette über die Zahnräder gezogen wird!), das verringert die Gefahr von störenden Abrutschern an den Zahnrädern. Idealerweise sollten sich das Gewicht der Gondel und die Gegengewichte an den Ketten die Waage halten, so genau ist es da aber nicht.
Das war im wesentlichen schon die Hardware. Abhängig von den verfügbaren Bauteilen kann der Plotter aber auch deutlich anders aussehen. Sobald die beiden Motoren montiert und mit dem Motor Shield verkabelt sind, können schon die ersten Tests mit der Software durchgeführt werden.
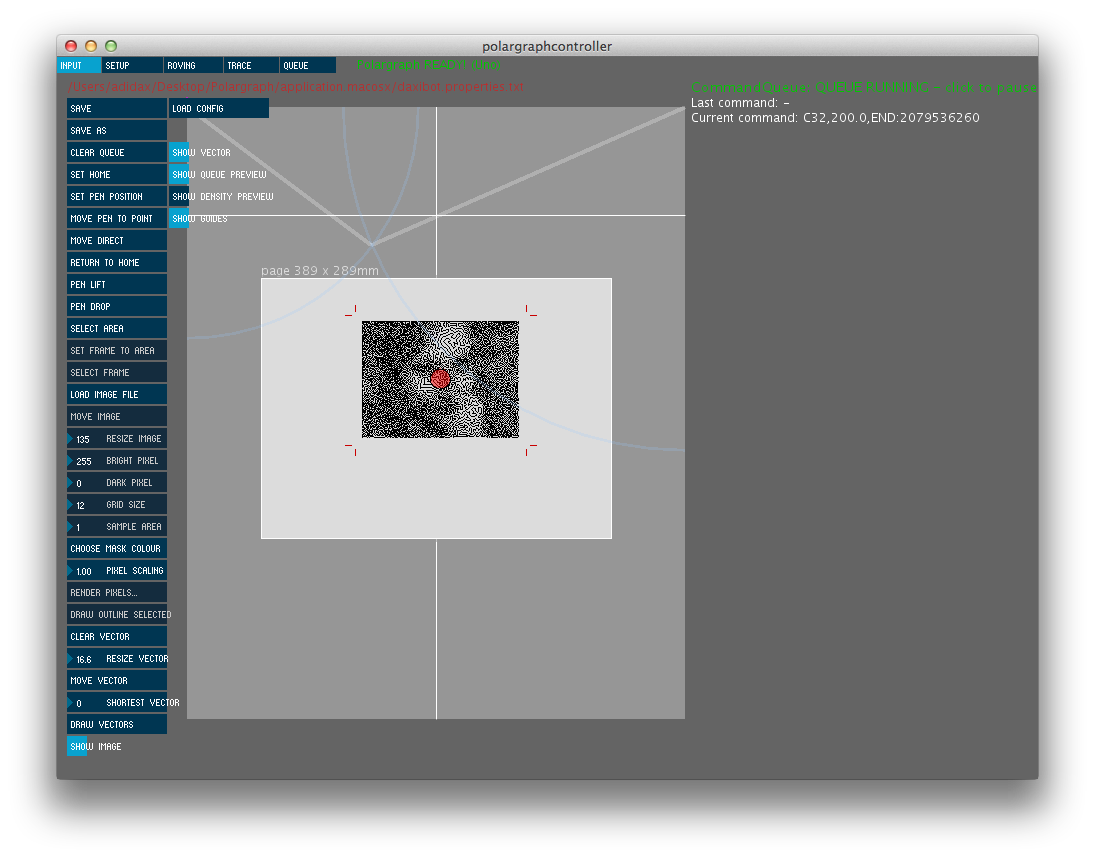
Ich verwende die Polargraph Firmware am Arduino und die zugehörige Processing App. Am Screenshot sieht man links die Schaltflächen für „Set Home“ zur Kalibrierung und „Move Direct“, mit denen man kontrollieren kann, ob sich der Plotter bei Steuerbefehlen auch in die richtige Richtung bewegt.
Dazu aber mehr im nächsten Artikel.
Pingback: Vertikalplotter im Selbstbau – Teil 2 – Software und Workflow | Makerblog.at
Hallo Adi,
zunächst mal vielen Dank für deine tolle Anleitung und die vielen Optimierungen. Wir werden den Plotter in einer etwas größeren Variante im IOX LAB nachbauen. Ich werde demnächst mal einige Photos posten.
Herzliche Grüße,
Robert
Hallo.
Habe ein Problem mit der Kompilierung des Polagraph Sketch.
Habe einen Arduino UNO ATmega328P mit Adafruit Motor Shield V2.
Wollte den Sketch „polagraph_server_a1“ kompilieren aber Ich bekomme immer die Fehlermeldung
polargraph_server_a1:157: error: ‚multiplier‘ was not declared in this scope
float mmPerStep = mmPerRev / multiplier(motorStepsPerRev);
polargraph_server_a1:158: error: ‚multiplier‘ was not declared in this scope
float stepsPerMM = multiplier(motorStepsPerRev) / mmPerRev;
exit status 1
‚multiplier‘ was not declared in this scope
was muss ich ändern oder hinzufügen das ich den Sketch auf den Arduino laden kann?
Hallo Tino
hatte das Problem eben auch. Das liegt an der neusten Version der Arduino Software. Einfach die Version 1.6.5 verwenden dann funktionierts!
Gruß
Lantbert
Hallo Lantbert
Danke für deine Hilfe. Hat Funktioniert, morgen werde ich Probieren mit dem Plotter etwas zu Drucken.
Hallo
bin neu / Anfänger
Eigendlich wollte ich nen 3D Plotter bauen –> zuschwer zum anfang
Als CNC fräse mmmhhhh
Plotter ok der Vplotter hat kaum Mechanische Teile dafür aber die Elektirktik
Also Uno besortg und nen Shield (V1 oder V2) weis nicht is aber mit dem L239
Dann Beispiel aufgespielt
Shield auf gesteckt
Powerjumper runter
Kabel angeschraubt vom Schrittmotor (6 V pro Phase unf ,7Amp)
Externe Strom dran (18Volt 300 mmA und 5,4 VA) ausen minus innen Plus
rein in den Uno
Jumper auf dem Board aufgesteckt
21 22 23 24 Sec und der eine Kondensator knallt ( tat weh )
Meine Frage is was war falsch ????? Könnt ihr mir helfen ??
Hallo Adi,
Nice project 👌🏾👌🏾
Hallo Adi,
ich bin begeistert von dem Kraxlbot!
Ich bin kein Selberbauer, aber ich würde gern ein fertiges Gerät kaufen.
Ich verarbeite Furnier und könnte damit sehr gut die Entwürfe auf das Vorlagepapier zeichnen.
Kennst Du eine Quelle oder bietest Du selber ein fertiges Gerät zum Kauf an?
Die Fläche, für die das Gerät in Frage käme wäre maximal 100 x 200 cm.
Viele Grüße und Danke im Voraus für Deine Antwort.
Heinz
Hallo Heinz, ich selbst biete nichts kaufbares an, aber Sandy Noble von polargraph.co.uk verkauft auch vorgefertigte Kits. Zwar nicht gerade Plug and Play, aber sehr einfach zum selbst fertigbauen. Schau dich mal auf seiner Seite um, Sandy antwortet auch fix auf Mails und steht mir Rat und Tat zur Seite. lg, Adi
hallo es gibt zwar im netz haufenweise diese Kettenschnüre für den antrieb,aber keine sprockerhol wheels dafür.
ich wäre für eine quelle dankbar
Hallo Adi
Ich bin sehr neu im Bereich des Arduino, ich hab einen Uno, mit einem Motorshield V1
einer 320×420 grundplatte quasi das 1/4 vom original. habe auch soweit alles verdrahtet, nur jetzt stehe ich vor problemen, vielleicht könntest du mir ein paar tipps geben bzw helfen.
Ich habe die aktuellste version, die schritte in der programmierung habe ich alle durchgeführt nur kriege ich nicht die richtigen einstellungen hin das der polargraph mir genau zeichnet.
-die home position fährt der nach der ersten fahrt nicht mehr korekt an
-nach beendigung fährt dieser komplett in den keller.
– ich sehe auch du arbeitest mit der mac version, diese gibt es online nicht mehr zum download vielleicht könntest du diese zur verfügung stellen.
und wir könnten vielleicht enger in kontakt treten.
mit freundlichen grüßen
piotrek,
Alles Oke .. wenn du die Perlenschnur beweglich machen willst . Nimmt eine kleine Kugellager für M3_er schrauben. Oben musst du größere loch bohren das du die schrauben durch past .
Für die Kugellager oben und unten eine unterlegscheiben damit die Kettenhalter nicht fest klemmst. Die kette wird nicht von oben sonder von der seit festgeschraubt.. das lassen sich schnell realisieren.
Die Stifthalterung so ist Oke .. Ich kann für dich die original (oder nach bau ) Hp Roland, Plotter Stifthalterung zu herz legen. Da zu gibt es Original Ersatz für ( Mine , Kuli, Kreide, ) .
Hallo Kritzler-FANs
Mein erstes Plotter-Projekt kommt gerade zum Stehen. Bin seit Tagen mit dem folgenden SetUp zugange.
HW: Arduino Uno R3 Clone ; 2 x Nema17 ; Adafruit MotorShield ; Servo
Mit einem Stepper Motor Sketch aus den Beispielen rennen die Motore wie wild.
SW: Ubuntu 20.04 ; ArduinoIDE 1.8.13 ;
PolarGraphServer_A1 aus dem Build von November 2017; und das Problemfeld Processing:
Mit der ersten Variante 3.5.4 hatte ich das Problem mit dem Size() – bekanntes Problem. Im weiteren das Problem mit einer fehlenden „MausRadSensing“ o.ä. Funktion. Ebenfalls bekannt – frage mich aber warum das nicht gefixed wird ?
Also – back to the roots. Installation der Version 2.2.1. Die geht im Prinzip, jedoch habe ich auch da mittelschwere Probleme mit dem Verhalten der Maus. Bspw. bleibt das JPG an der Maus „hängen“ und dann verschwindet es von der Arbeitsfläche. Komme ich deshalb nicht ans Ziel eines Plots ?
Noch mehr vermisse ich eine Beschreibung zu dem gesamten BildverarbeitungsWorkflow. Ich schwanke – einfach gesagt – zwischen der Erklärung a) Bedienungsfehler und/oder b) SoftwareBugs.
Das Setup der Maschine und gewisse Handlings werden mir nach einigen Tagen immer klarer.
Daher nun meine Bitte: Kann ich davon ausgehen, dass es mit der Version 2.2.1 gehen müsste ? Welche nutzt ihr ?
Vielen Dank im Voraus
Vielen Dank für diese ausführliche Anleitung. Nur: könntest Du bitte genauere Angaben zu den Schrittmotoren machen (Modell, Spannung, Leistung etc), denn leider funktioniert der Link zu physicalcomputing.at nicht mehr.
Hi. I did all the things you said. But the final dimensions are very different from the dimensions within the software. It is possible to help. Thanks